Automating Feature Engineering in Supervised Learning
Automating Feature Engineering in Supervised Learning
Introduction
举了一个例子。通过用 $sin $ 进行映射,样本点可以被分组。
$\to$ 定义一个映射函数
举心脏病的例子,说明实际上真正重要的因素往往是几个主要因素的组合,如$ BMI $
New tech consider the selection of features as black boxes, and is drien by the actual performance.
$\to$ applying reinforcement learning
Challenges in Performing Feature Engineering
人工极大根据经验
强化算法也不需要经验
Terminology and Problem Definition
-
$F=\lbrace f_1,f_2,…,f_m \rbrace$
-
$A\ target\ vector\ y$
-
$A\ suitable\ learning\ algorithm\ L$
-
$A\ measurement\ of\ performance\ m$
-
$A_L^m(F,y)\ signify\ performance$
for example, $L$ can be Logitic regression and m is cross entropy
-
$Assume\ a\ set\ of\ transformation\ function\ \lbrace t_1,t_2,…t_m \rbrace $
$$ f_{out}=t_i(f_in)\ where\ f_{in},f_{out} \in R^n$$
define set of operations: $+$
aim: $$ F^*=argmax_{F1,F2}A^m_L(F_1 \bigcup F_2) \ F1\ from\ original\ dataset \ F2\ form\ derived\ dataset $$
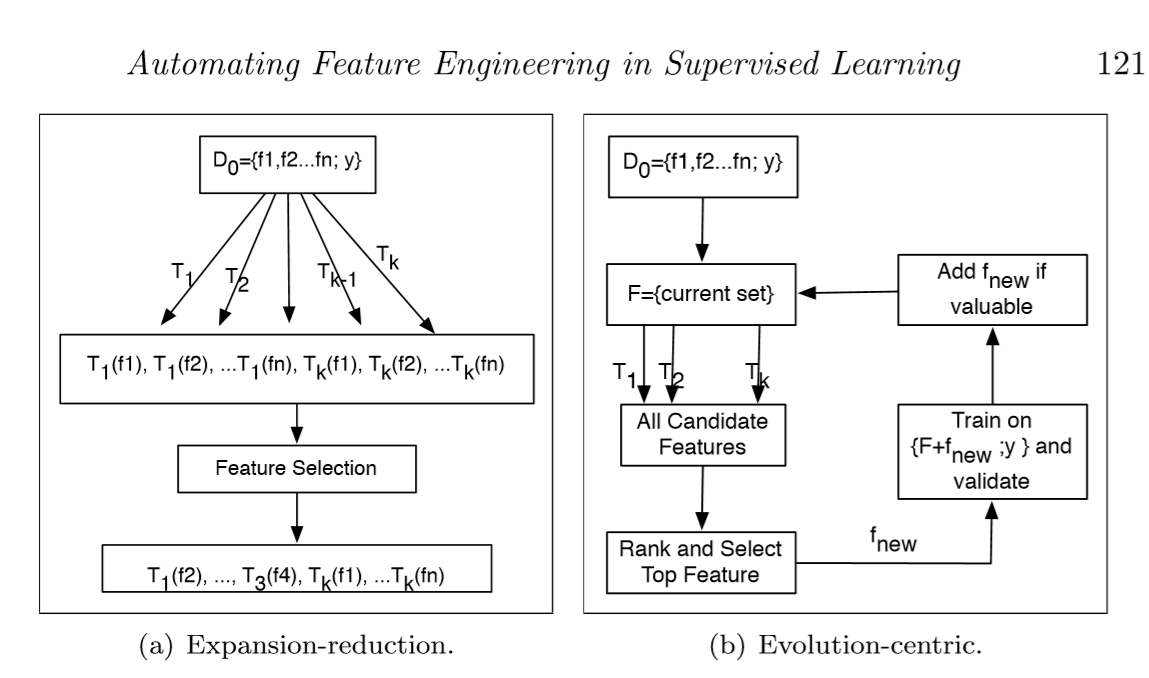
A Few Simple Approaches
-
Apply all $Transformation\ Function$ to the given data and sum them up
-
Ad: Easy
-
Dd:computation inefficiency & overfitting
-
-
Every time add a new feature, train and evaluate
-
more scalable
-
Dd: also slow because the model training and evaluation
refuce the deep composition of transforms
-
Hierarchical Exploration of Feature Transformations
idea: batching of new features & hierarchical composition
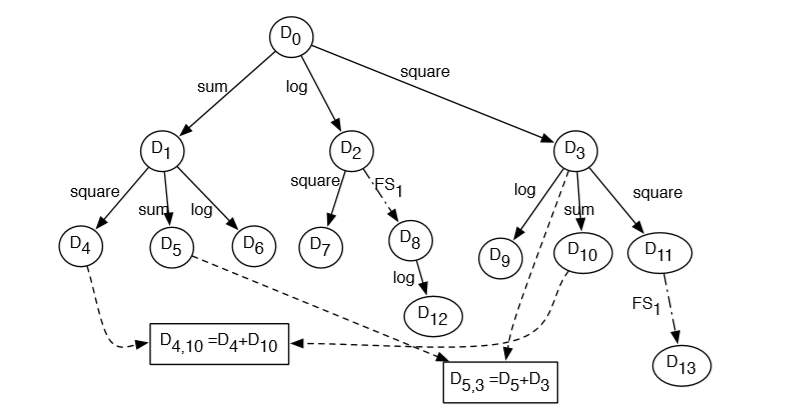
Transformation Graph
The transformation graph: $G$
Given Dataset:$D_0$
After each transformation, the target will not change
The node type:
- start
- from $T(D_{before})$
- from $D_1+D_2$
$\theta (G)$ refers to all nodes in $G$
$\lambda(D_0,D_1)$ refers to the transformation function $T$ makes $D_0 \to D_1$
the best solution is always among one of the nodes
Transformation Graph Exploration
Dataset D_0, MAX_SEARCH_TIMES
# G_0 is start_gragh, D_0 is the start_dataset
# G_i refers to the graph after i-1 transformation
time =0
while time < MAX_SEARCH_TIMES:
Nodes = θ(G_time)
b_ratio = time / MAX_SEARCH_TIMES
Nodes_plus,Transform_plus = argmax(n,t) Rank(G_time,Nodes,Transform,b_ratio)
G_(time+1)=Apply Transform_plus on Nodes_plus
time = time+1
'''
time can be any element through the exploration, like consuming time
'''
Learning Optimal Traversal Policy
consider the reinforcement as Markov Decision
the state at step i is divided into two parts:
(a). $G_i$ after i node-addtions
(b).the remaining budget $b_{ratio}=\frac {i}{B_{max}}$
Let the entire set of states as $S$
an action at step i is$<n,t>$
$n$ is nodes to add while $t$ is transformation function in accord
To each step i, we get a reward $r_i$
$$ r_i =max_{n'\in\theta(G_{i+1})}\ A(n') - max_{n\in\theta(G_{i})}\ A(n)\ where\ r_0=0 $$ The cumulative reward over time from state $S_i$
$$ R(S_i)=\sum_{j=1}^{B_{max}} \gamma ^i \cdot r_{i+j} $$ We apply $Q-Learning$
$$ Q(s,c)=r(s,c)+\gamma(R)^\prod (\delta(s,c)) $$ The aim is:
$$ \prod^*(s,c)= arg\ max_cQ(S,C) $$
Give an approximate prediction:
$$ Q(s,c)=w^c \cdot f(s) \where f(s)=f(g,n,t,d) $$